
Imagine being wheeled into the operating room where your surgical team awaits – the surgeon, the anesthesiologist, and … a tiny robot crab.
Northwestern University scientists have built a super-small robot crab that could one day carry out delicate surgical tasks – entering your body to suture small, ruptured arteries, clear clogged arteries, or track down cancerous tumors.
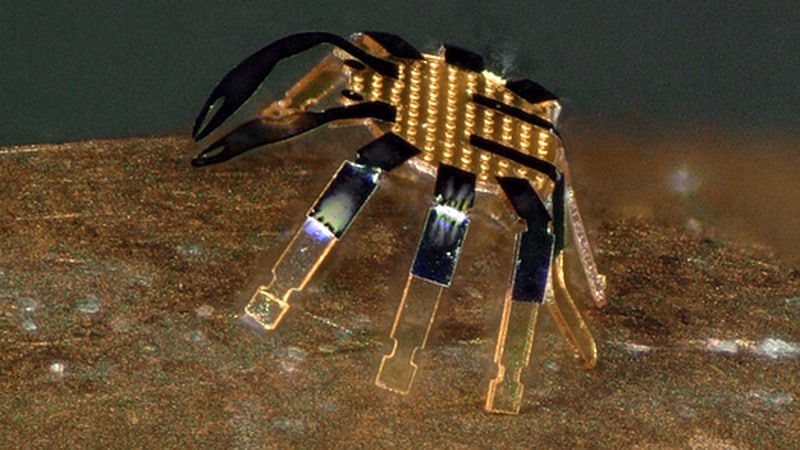
The six-legged, half-millimeter-wide peekytoe crab, described in a recent issue of Science Robotics, is the world’s smallest remote-controlled walking robot. It can bend, twist, walk, and jump and is operated using a remote-controlled laser.
It’s one of the newest advances in research spanning a decade that aims to create miniature machines to do practical jobs in hard-to-reach places. This synthetic crustacean and other “microrobots” may be helping surgical teams sooner than you think, thanks to advances in robotics and materials science. But what must happen before this future becomes reality?
The Making of a Robot Crab
Making a flea-sized robot crab is “pretty simple,” says bioelectronics engineer John Rogers, PhD, who led the research. “It consists of three types of materials: a polymer, a shape-memory alloy, and glass.”
The polymer, a plastic-like material, is used in microelectronics. The second component, the shape-memory metal alloy, is bonded with the polymer to make up the joints and legs. The third component is a thin coating of glass applied to the entire outside of the robot’s body.
“The glass provides an exoskeleton. It gives a rigidity to the overall body of the robot,” says Rogers.
The robot operator points a laser at a specific spot on the crab, triggering a thermal mechanism that makes the robot move.
“By shining it on certain limbs, we can create a specific gait,” Rogers says, explaining that the heat “unfolds” the crab. When the robot cools, it returns to its original shape. This folding and unfolding creates locomotion – the crab walks.
Rogers credits his students with choosing the crab – they liked the way it scooted sideways – but he says any creature could probably be made smaller.
How Will We Use Tiny Robots in Medicine?
While Rogers hesitates to sell any specific medical use too hard, surgical applications seem most promising for this technology. For use deep inside the human body, Rogers says, “you’d probably want a swimmer – like a fish. There are other groups working on swimmers.”
Renee Zhao, PhD, an assistant professor of mechanical engineering at Stanford University, is one such scientist. In a newNature Communicationsarticle, she and her colleagues report on their “spinning-enabled wireless amphibious origami millirobot.” (Say that five times fast.)
The mini robot – closer to the size of a fingertip – looks like a tiny cylinder and features an origami-inspired pattern that twists and buckles. It glides through viscous liquid and over slick surfaces and masses (such as human organs), rolling, flipping, and spinning with the help of a remote magnet. The folding and unfolding of the cylinder serve as a pumping mechanism and can be used for targeted delivery of a liquid drug. It might, for instance, carry medicines into the body to help stop internal bleeding, Zhao says.
“We are improving the system by further downsizing it for biomedical applications in narrower environments such as in blood vessels,” she says.
In their paper, Zhao and her co-authors also note that mini cameras and mini forceps could be put into the millirobots to perform endoscopy and biopsy procedures, which in theory might carry less risk to patients than current techniques.
But there was a lot of trial and error during the design stage of the robot, Zhao says.
“The trickiest part is to have an optimized swimming performance,” she says, because the density of the robot needs to be very close to the density of the liquid it is “swimming” in.
What’s Next
Right now, Zhao’s amphibious robot is still in the trial stages that come before animal testing. If it clears those hurdles, it will then be studied in human clinical trials.
That means it will likely take years before swimming cylinders – or robot crabs, for that matter – are helping cardiac surgical teams or suturing organs.
“This is early-stage exploratory work,” Rogers says. “We are trying to introduce ideas as part of a broader community of researchers pursuing micro-robotic technologies, with the hope that over time, these technologies will ultimately lead to practical clinical uses for surgical purposes. It’s very much a starting point.”
Sources
John Rogers, professor of materials science and engineering, biomedical engineering, and neurological surgery, Northwestern University McCormick School of Engineering and Feinberg School of Medicine.
Renee Zhao, PhD, assistant professor of mechanical engineering, Stanford University.
Science Robotics: “Submillimeter-scale multimaterial terrestrial robots.”
Nature Communications: “Spinning-enabled wireless amphibious origami millirobot.”
Source: Read Full Article